6-DOF Robotic Arm
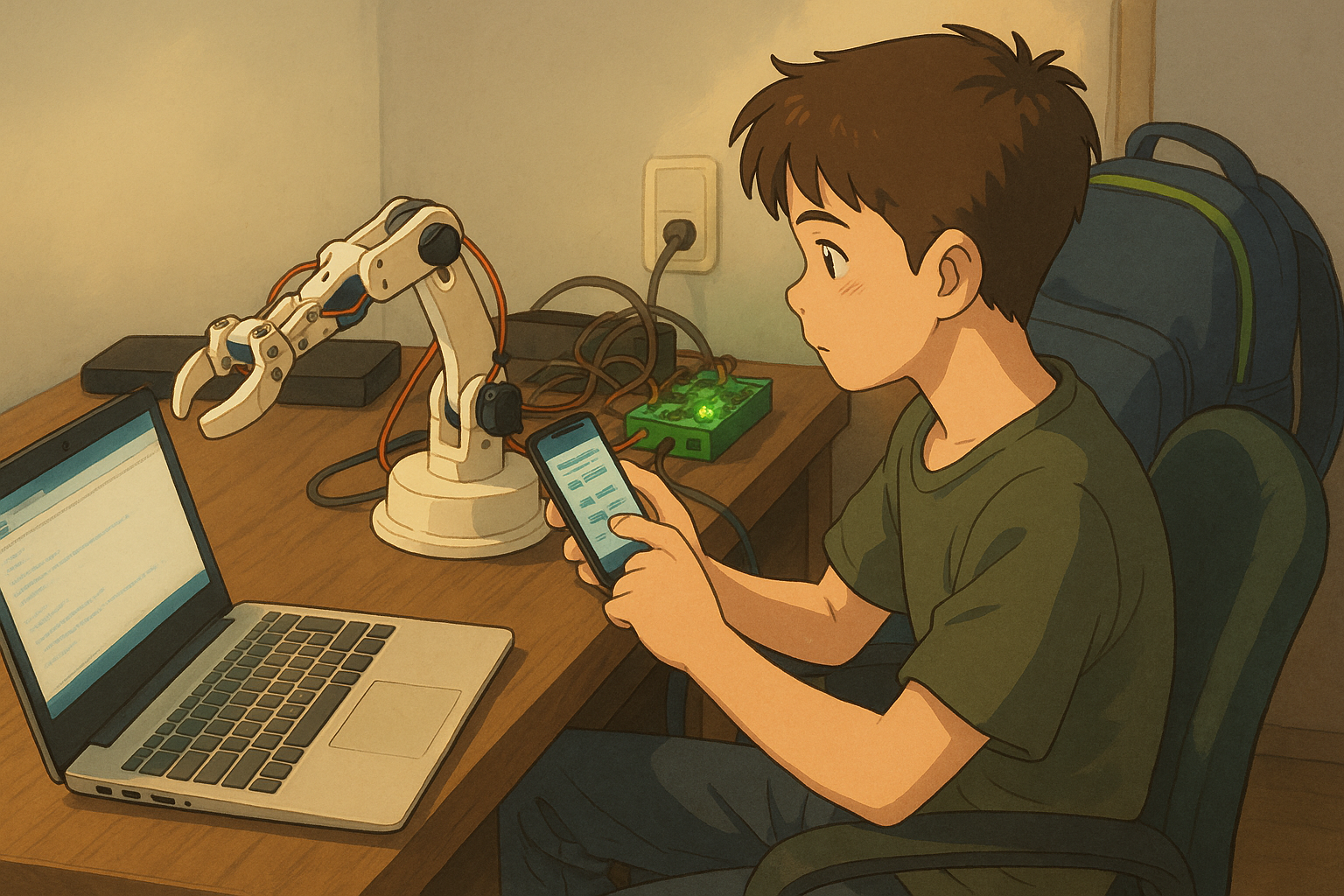
Six-axis robotic arm I designed, 3D-printed, and programmed from scratch. Controlled via a custom Android app over Bluetooth.
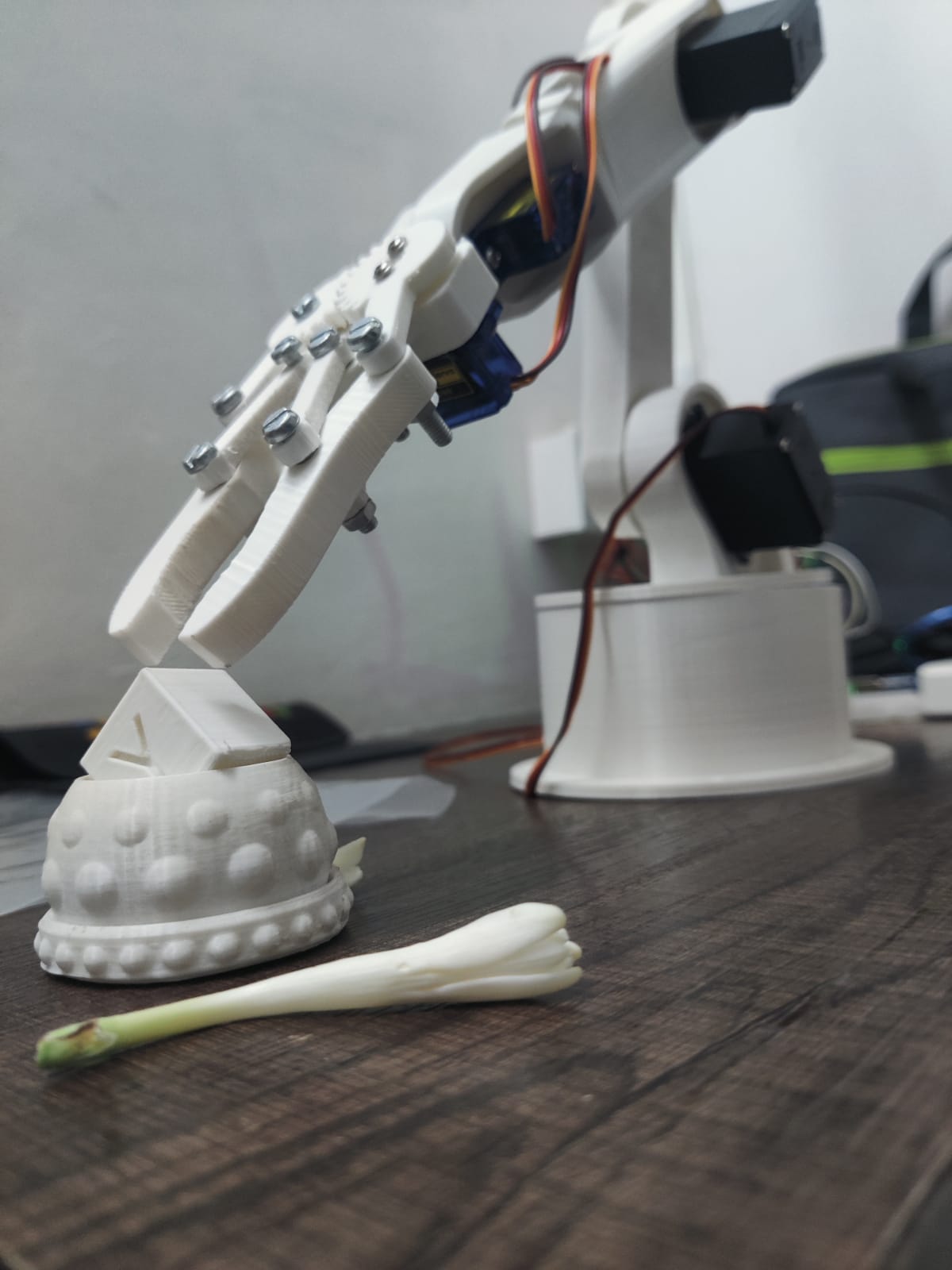

Designed the frame in Blender, 3D-printed it on an Ender3 with custom slicing profiles tuned for torque vs rigidity, and wired six stepper motors through driver boards to an Arduino.
The Kotlin Android app talks to the arm over Bluetooth (HC-05) with a joystick interface for manual control and saved sequences for repeatable actions. Built real-time telemetry that feeds back joint positions and flags errors in a dashboard UI.
Each joint needed its own motion mapping, constraints, and smoothing to prevent jitter. Wrote a custom PID tuning routine for the motor controllers and designed a compact control box to house all the wiring. The arm could do reliable pick-and-place operations in a controlled environment.